















De Whitlock stuurstand
 Oorspronkelijk was de boot uitgerust met een Whitlock stuurstand, met daarop alle motor instrumenten en controle lampjes. Met de voortschrijdende technische ontwikkelingen een plek waar beter andere instrumentarium kon worden gerealiseerd. Ook was er in mijn opinie een betere plek te vinden voor de bedieningshandle van de motor, die aan de stuurboordzijde in de kuip was gemonteerd.
Oorspronkelijk was de boot uitgerust met een Whitlock stuurstand, met daarop alle motor instrumenten en controle lampjes. Met de voortschrijdende technische ontwikkelingen een plek waar beter andere instrumentarium kon worden gerealiseerd. Ook was er in mijn opinie een betere plek te vinden voor de bedieningshandle van de motor, die aan de stuurboordzijde in de kuip was gemonteerd.
Tijdens de aankoop was al geconstateerd dat de speling op de besturing te groot was. Omdat ik afspraken had gemaakt ten aanzien van een gezamenlijke deling van de hoge kosten die zouden kunnen voortvloeien uit revisie van de besturing heb ik vrij snel na de aankoop een nadere inspectie uitgevoerd. Naast reeds vastgestelde ruimte op de glijlagers van de roeras, bleek dat de lagers van de stuurstand zelf ook speling vertoonden. Ook bleek dat twee tanden van het pinionwiel waren afgebroken. Vooral dat laatste heeft mij doen besluiten om zowel de complete stuurstand als de roerlagers te vervangen. Gekozen is voor Jefa delen, in Nederland in 2008 vertegenwoordigd door https://www.nautec.nl

De RP300 stuurstand
Ik heb de stuurstand vervangen door een RP300 rack and pinion steering pedestal. De handle voor de motorbediening is een integraal deel van de stuurstand en zit aan de rechterzijde. Vanuit ergonomisch en stuurtechnisch oogpunt is dit een veel betere plek. Alle controle instrumenten en het startslot voor de motor zijn naar de zijkant van de kuip verplaatst.
Een nieuwe roerstandindicator, de toerenteller, de nieuwe boegschroefbediening en de bediening van de stuurautomaat zijn (in 2013) de stuurstand zelf gemonteerd.
Het radarscherm en de kaartplotter zijn in een separate pod op de beugel van de stuurstand geplaatst.
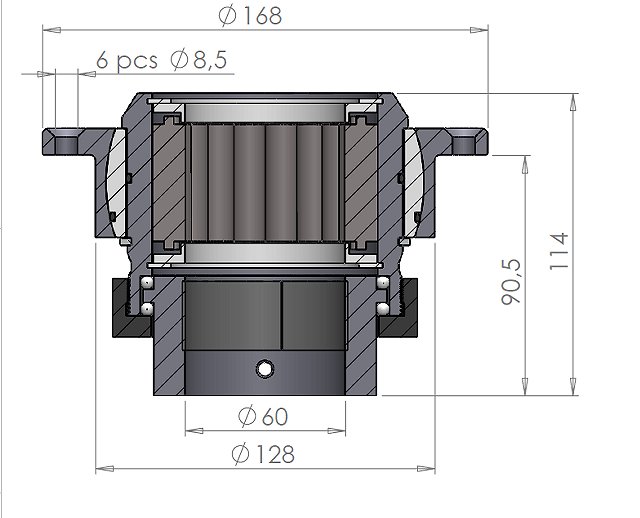
Het zelfinstellende bovenste roerlager
De Delrin glijlagers van het roer zijn vervangen door ‘self aligning roller bearings’. Voor het bovenste lager is de bevestiging aangepast en behoorlijk verstevigd. Voor het onderste lager is gekozen voor een nieuwe hennegatskoker met geïntegreerd onderlager van Jefa. De originele hennegatskoker is verwijderd en de nieuwe koker is in de romp gelamineerd, hetgeen gepaard ging met de nodige glasmat en epoxy werkzaamheden.
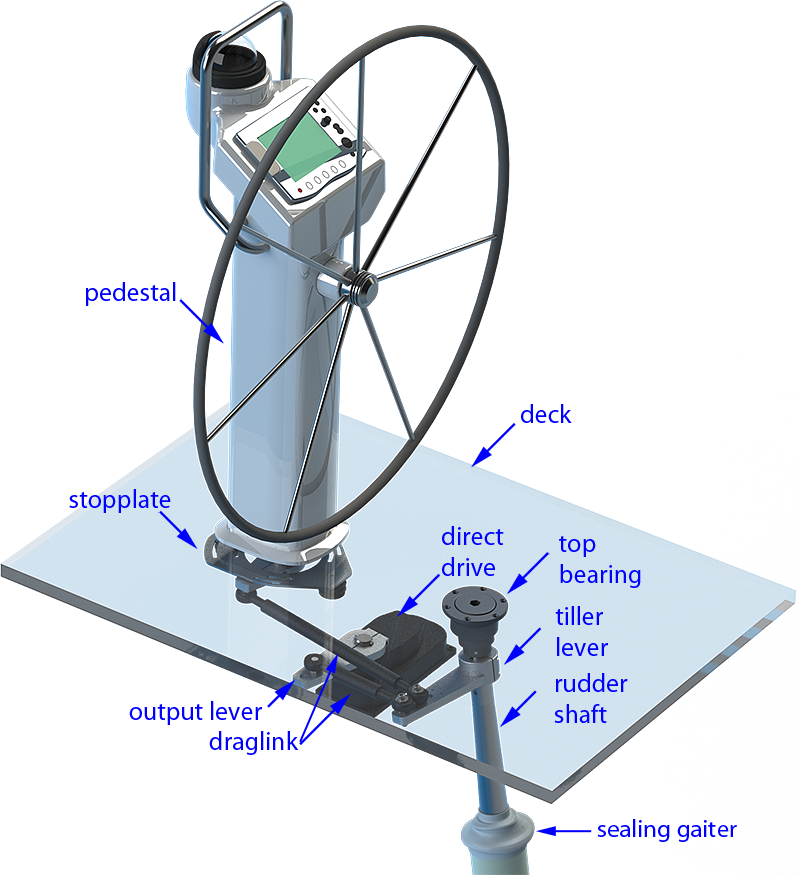
Een voorbeeld installatie. Op de HQ is de draglink op een separate lever gemonteerd.
In het voorjaar van 2013 heb ik de boot voorzien van een onderdekse autopilotmotor. Hiervoor is gebruik gemaakt van een Jefa type DD1 autopilot drive die het roer rechtstreeks aanstuurt via een korte draglink en een separate lever, gemonteerd op de roeras. De type 300 Autohelm stuurcomputer en de ST 7001 bedieningsconsole waren al eerder gemonteerd.
Een geweldige verbetering omdat de boot op ieder willekeurig moment kan worden ingeschakeld en verder zichzelf kan sturen op één graad nauwkeurig.



